
DMT automática no QGIS
Em síntese, a incorporação de cálculos automáticos de DMT baseados em topografia digital consolida-se como uma ferramenta estratégica para o planejamento mineiro moderno, ao unir precisão técnica, agilidade operacional e maior confiabilidade econômica. A automação desse processo permite que o planejamento acompanhe de forma dinâmica a evolução da lavra, reduzindo incertezas associadas ao transporte de material e antecipando impactos nos custos operacionais. Dessa forma, a DMT deixa de ser apenas um parâmetro estimado e passa a atuar como uma variável de controle contínuo, contribuindo para decisões mais assertivas, melhor uso dos recursos e maior eficiência global das operações de mineração.

1. Introdução
Na mineração, o custo de movimentação de material representa uma das parcelas mais significativas do custo operacional, especialmente em minas a céu aberto. Nesse contexto, a DMT – Distância Média de Transporte é um dos principais indicadores técnicos utilizados no planejamento de lavra, no dimensionamento de frotas e na avaliação econômica de projetos mineiros.
A DMT está diretamente associada ao consumo de combustível, à produtividade dos equipamentos, ao tempo de ciclo dos caminhões e, consequentemente, ao custo por tonelada movimentada. Pequenas variações na distância média podem resultar em impactos econômicos expressivos, especialmente em operações de grande escala.
A obtenção automática da DMT (Distância Média de Transporte) a partir de modelos topográficos digitais representa um avanço significativo para o planejamento das atividades de mineração, pois permite integrar, de forma rápida e consistente, a geometria real do terreno, as rampas, os acessos e os pontos de carga e descarga. Ao automatizar esses cálculos, reduz-se drasticamente o tempo gasto em estimativas manuais ou aproximações simplificadas, ao mesmo tempo em que se aumenta a precisão dos resultados, refletindo trajetos reais e condições operacionais dinâmicas. Isso possibilita avaliações mais ágeis de cenários de lavra, ajustes frequentes no sequenciamento e no layout da mina, além de decisões mais embasadas sobre custos de transporte e dimensionamento de frota, tornando o processo de planejamento mais eficiente, confiável e alinhado à realidade operacional.
2. O que é DMT (Distância Média de Transporte)
A Distância Média de Transporte corresponde à distância média percorrida pelo material lavrado, desde o ponto de carregamento (frente de lavra) até o ponto de descarga, como:
- Pilhas de estéril
- Britadores
- Pátios de homogeneização
- Pilhas pulmão
- Usinas de beneficiamento
A DMT é normalmente expressa em metros (m) ou quilômetros (km) e pode ser calculada separadamente para:
- Minério
- Estéril
- Rejeito
- Diferentes fases ou bancadas
3. Método do caminho mínimo
3.1. Conceito geral
Para a projeção de uma DMT automática o método do Caminho Mínimo busca encontrar, entre dois pontos (origem e destino), o trajeto que minimiza um custo acumulado, e não necessariamente a menor distância geométrica.
Formalmente:
Objetivo: minimizar o custo total C ao longo de um caminho P
onde:
- = conjunto de células percorridas
- ci = custo de atravessar a célula
Sendo o custo do caminho, no caso em que estamos modelando, associado a sua declividade. Para isso é utilizado um arquivo raster da topografia em que cada nó está associado a esta declividade utilizando o algoritmo de Dijkstra.
3.2. Algoritmo utilizado (Dijkstra)
O QGIS utiliza essencialmente uma versão raster do algoritmo de Dijkstra.
Passos formais:
- Inicializa:
- Atualiza iterativamente os custos acumulados:
- Continua até alcançar o destino ou preencher toda a grade
4. Aplicação no QGIS
4.1 Calcular raster a partir da topografia
Primeiramente precisamos das curvas topográficas do terreno para definir o menor caminho entre dois pontos escolhidos. É importante que as coordenadas das curvas adotadas não esteja em um sistema geográfico, mas se possível em uma projeção UTM.
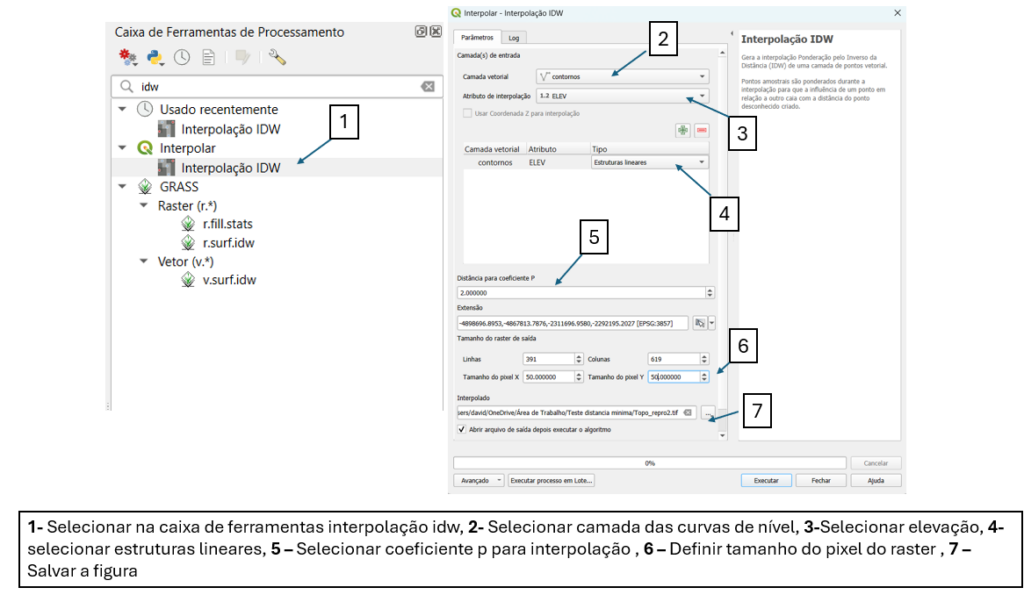
Realizamos então uma interpolação com estas curvas de nível utilizando o inverso do quadrado da distância (IDW), para gerar uma imagem raster da topografia. O método IDW é uma metodologia de interpolação que utiliza a seguinte premissa:
O valor interpolado em um ponto é calculado por:
onde o peso é definido por:
e:
- = valor conhecido no ponto i
- = distância entre x0 e xi
- = potência do IDW
- = número de pontos usados
Essa imagem raster será base para o cálculo da distância mínima. É importante nesta etapa selecionar um tamanho de pixel que seja condizente com a resolução do terreno para que não seja perdida informação. O objetivo é que as curvas de nível se aproximem o máximo possível da imagem raster criada. Tamanho de pixels muito pequenos também gerarão imagens pesadas e um maior tempo de processamento, enquanto pixels maiores perdem a resolução da topografia selecionada.
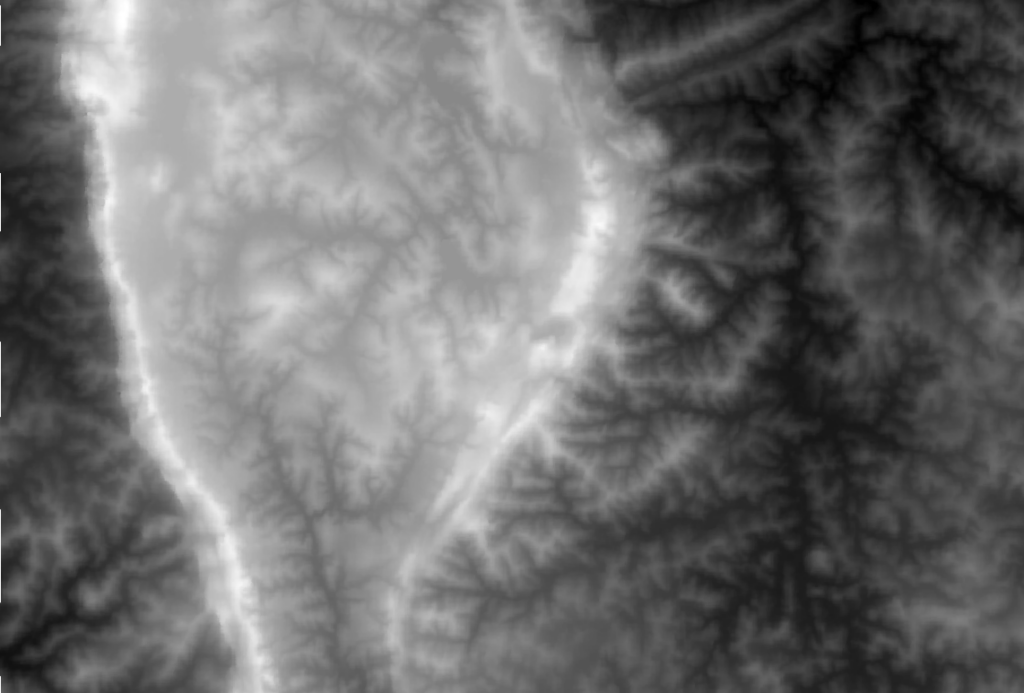
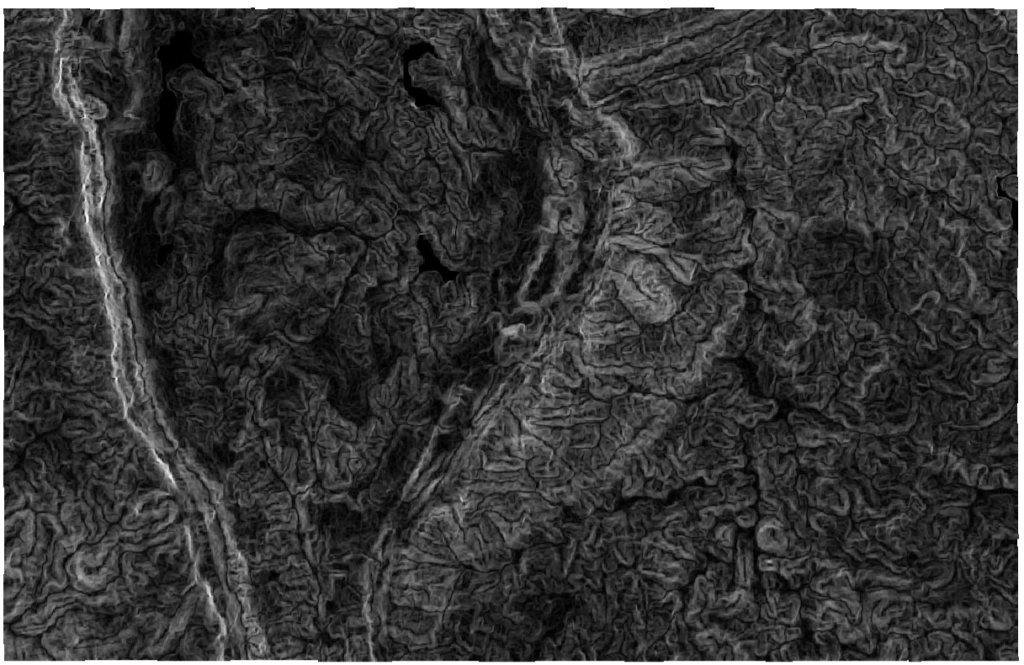
O resultado que obtemos é uma imagem raster da topografia selecionada como apresentado a seguir
4.2 Calcular inclinações do terreno e criar raster de restrição da inclinação
Em seguida calculamos as inclinações do terreno que serão os pesos para o algooritmo de menor custo. Para isso utilizamos a função slope ou declividade do qgis.
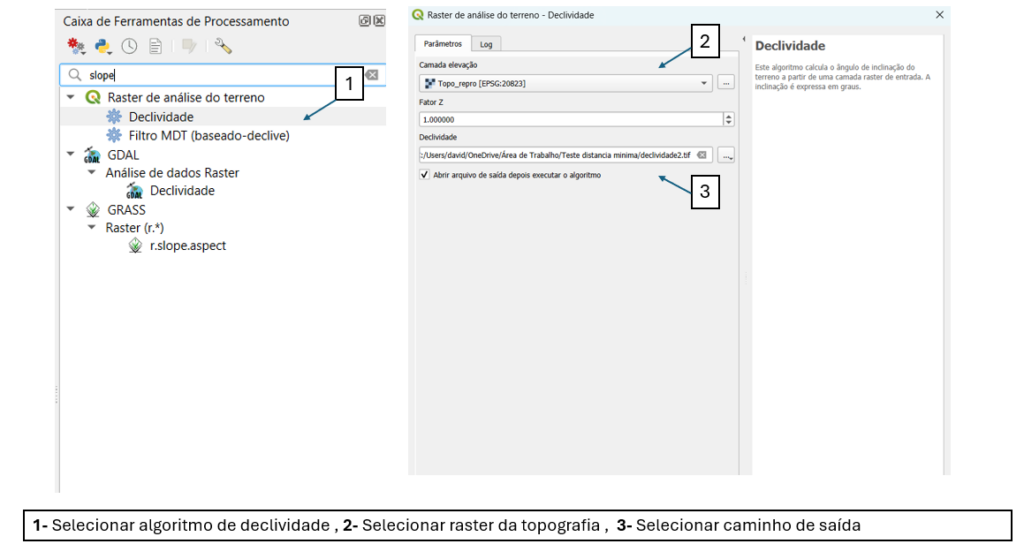
Este resultado nos gerará um mapa com as inclinações de 0º-90º do terreno
O objetivo é agora transformarmos estas inclinações em pesos adequados para rodarmos o algoritmo de caminho mínimo. Lembre-se que o caminho mínimo não significa distância mínima, mas menor custo em relação ao seus pesos. Logo o que queremos é que para uma inclinação que o que equipamento não suporte este peso seja o máximo, enquanto seja maior o possível no seu limite, para que avance o máximo da diferença de terreno cumprindo uma menor distância horizontal.
Para isso utilizamos a condição que se a inclinação for maior que o equipamento suporta em graus ela recebe um valor extremamente alto (neste exemplo maior que 10º) , mas se tiver entre 0-inclinação limite , o peso cresce a medida que cresce o ângulo. Uma alternativa é utilizar a fórmula 100/(declividade + 0.01) sendo o valor de 0.01 utilizado para evitar a divisão por zero.
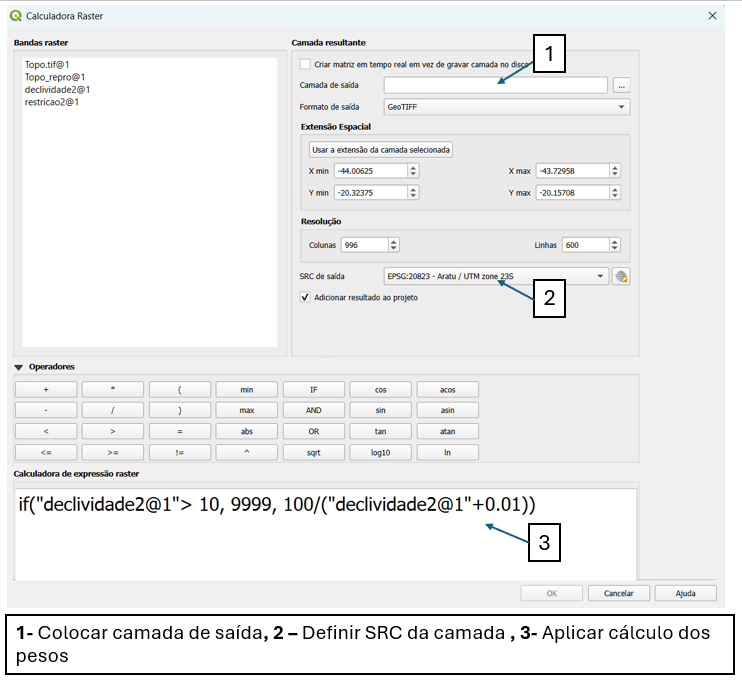
Com isso temos um mapa de pesos como apresentado na figura abaixo. Como podemos ver as zonas brancas possuem inclinações inadmissíveis para o equipamento sendo possível apenas dimensionar a estrada onde se situam as regiões pretas.

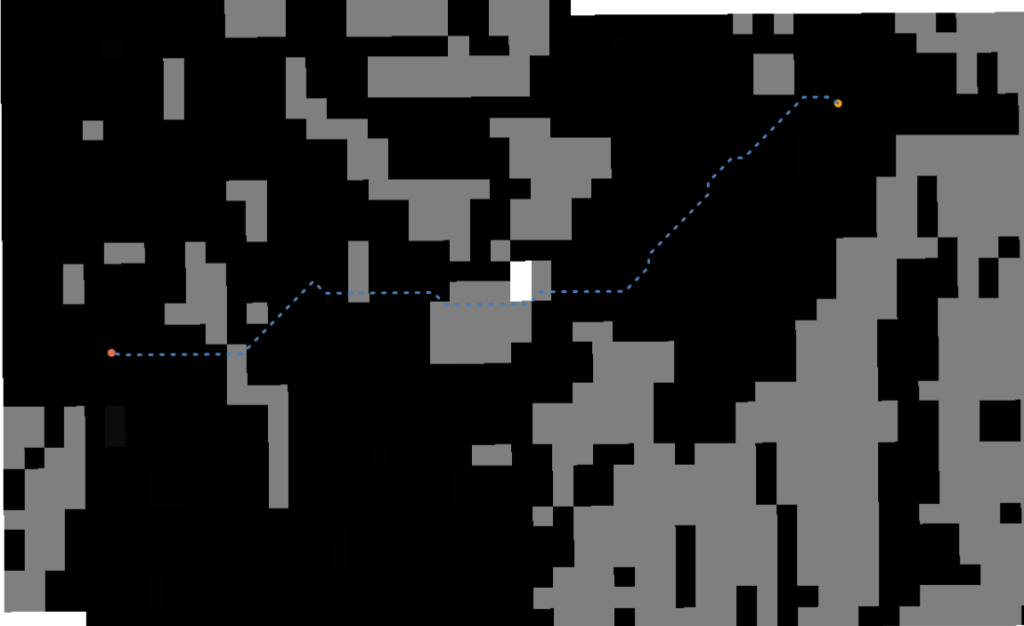
4.3 Definir caminho mínimo (Least cost Path)
Criamos então um ponto inicial e final onde o algoritmo de caminho mínimo irá percorrer. Esses pontos devem estar no mesmo SRC dos mapas até então gerados.

Então utilizamos o algoritmo Least Cost Path obtido nos plugins do QGis definindo os pontos iniciais e finai tal como o raster de restrição criado.
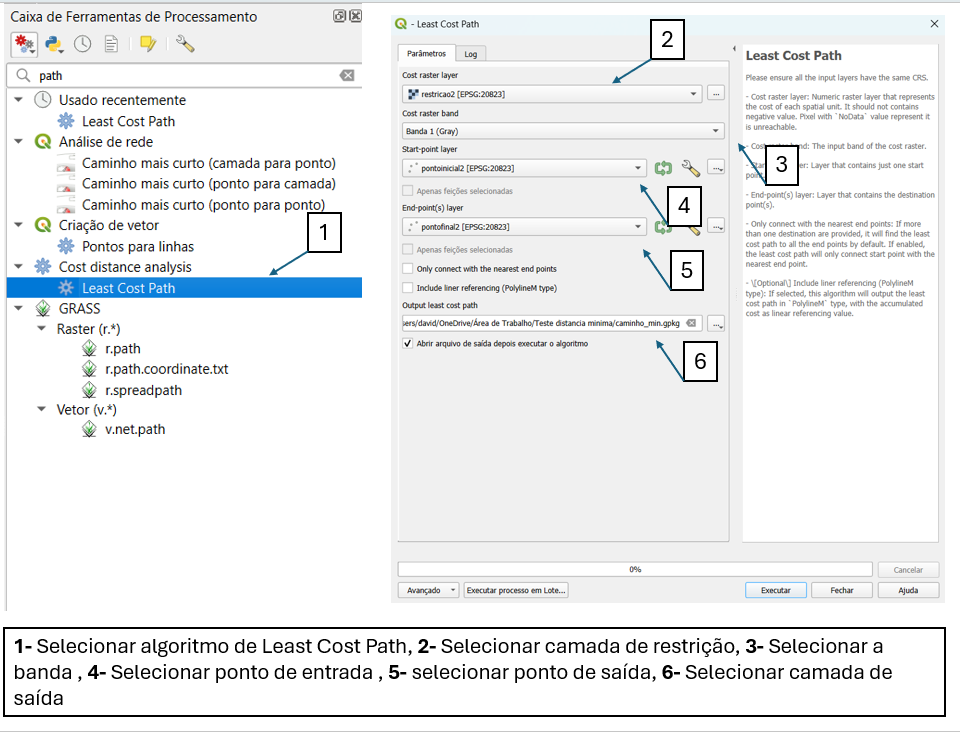
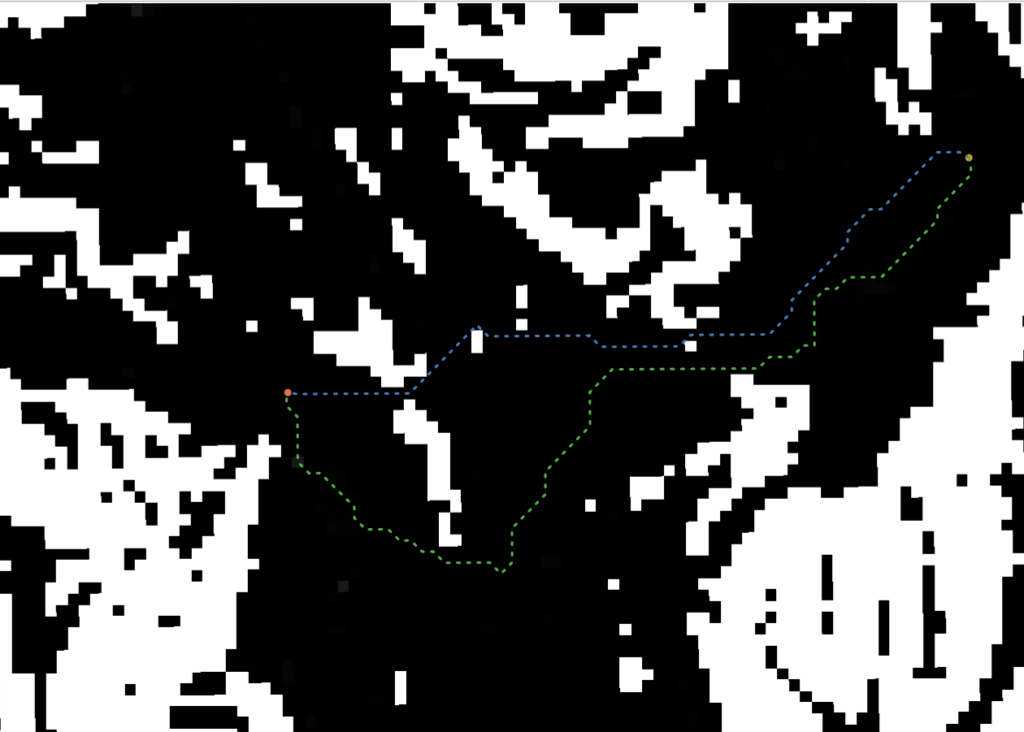
Com isso obtemos o caminho mínimo de um ponto ao outro.
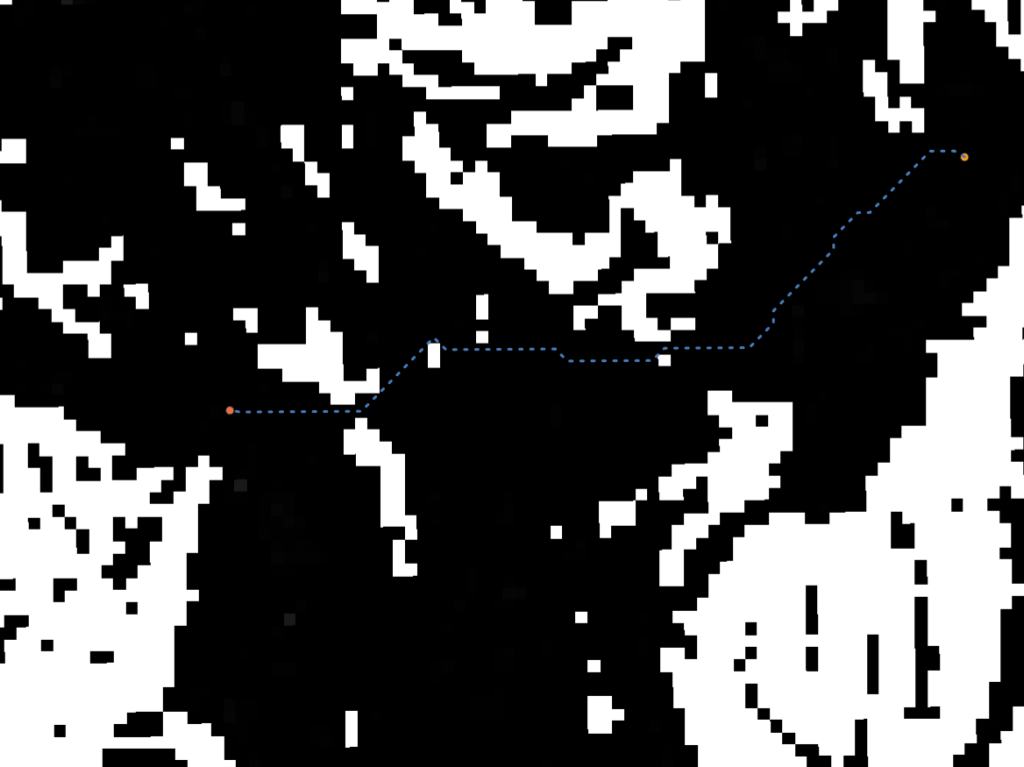
A configuração dos pesos é essencial para a definição do caminho mínimo. Veja o resultado que obtemos quando utilizamos apenas a inclinação como peso da distância
4.4 Definir a inclinação do caminho mínimo na string e analisar os resultados
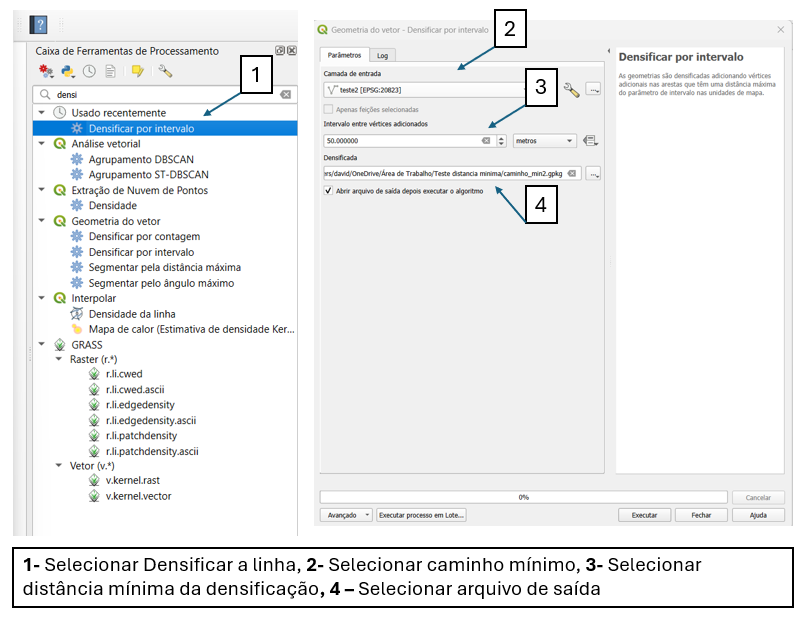
Os próximos passos são realizados para calcular a inclinação no caminho mínimo já selecionado e a validação dos resultados. Primeiramente vamos densificar o caminho ótimo (colocar mais trechos na string) , com tamanhos compatíveis com os pixels da topografia.
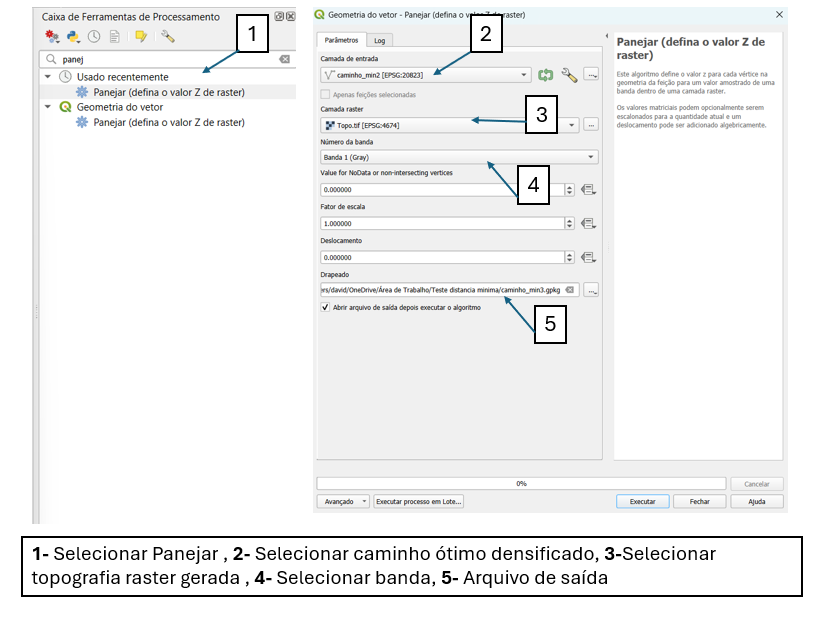
Em seguida panejamos a superfície com a topografia, ou seja colamos o caminho densificado com a superfície de referência raster que geramos.
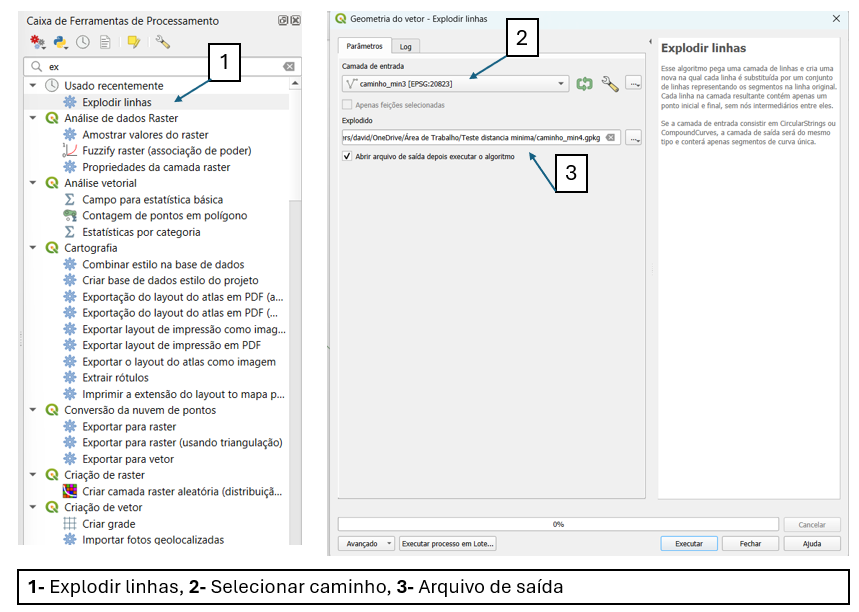
Em seguida explodimos as linhas para os seus diversos segmentos.
Realizamos então o cálculo da inclinação do caminho ótimo a partir da tabela de atributos utilizando o seguinte código:
CASE
WHEN ((length($geometry) < 0.00001) and (length($geometry) > -0.00001)) THEN 0
ELSE
atan(
(
z(end_point($geometry)) -
z(start_point($geometry))
)
/
length($geometry))*180/3.14159
END
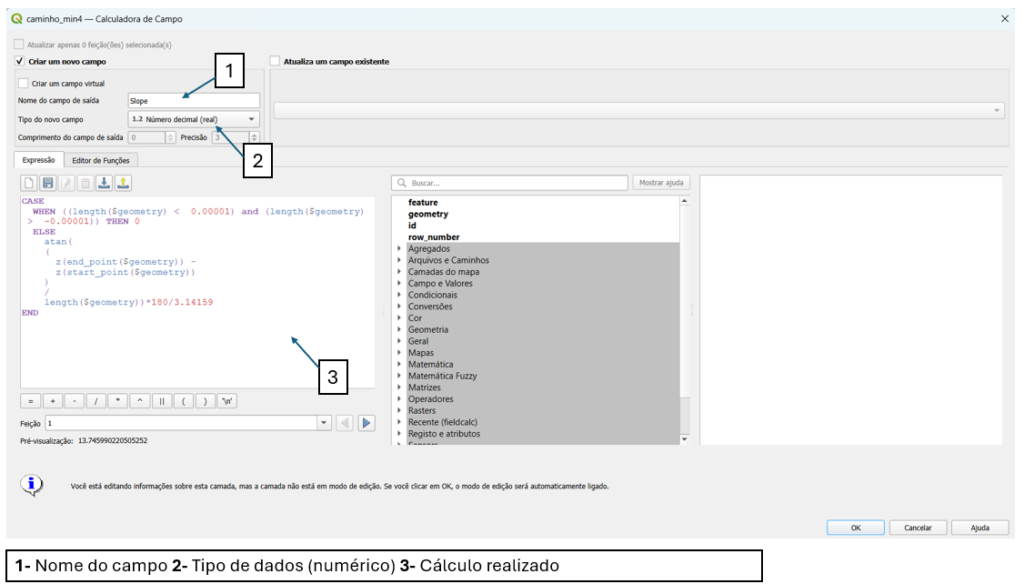
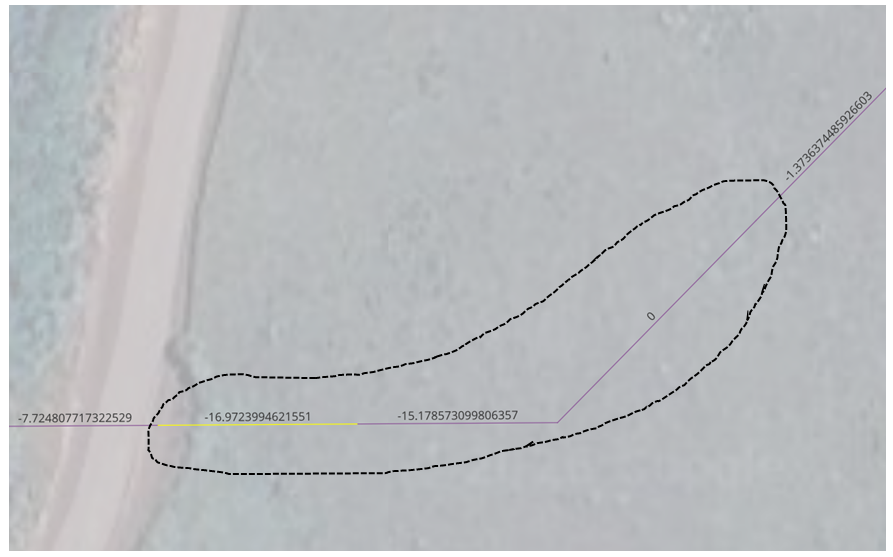
Com isso conseguimos observar a inclinação do caminho ótimo ao longo do seu comprimento e analisar possíveis modificações e atualizações.

Encontrar o caminho mínimo com o uso destes pesos não significa que as restrições serão obrigatoriamente cumpridas em todos os trechos do caminho. Podem haver locais onde o algoritmo prefere um custo mais alto (inclinação mais alta) mesmo que os pesos sejam altos, pois a distância horizontal que cumpriria seria demasiadamente grande. Para isso é necessário um pós processamento e análise do caminho de forma a solucionar os pequenos trechos que encontramos essas diferenças
4.5 adicionar restrições a mais no modelo
Demais regiões como estradas, barragens, regiões de APP, locais de proteção e outras restrições também podem ser adicionadas como restrições nos pesos do arquivo raster gerado.
Convertemos então o polígono para raster utilizando um id que seja compatível com o peso que desejamos para a área.
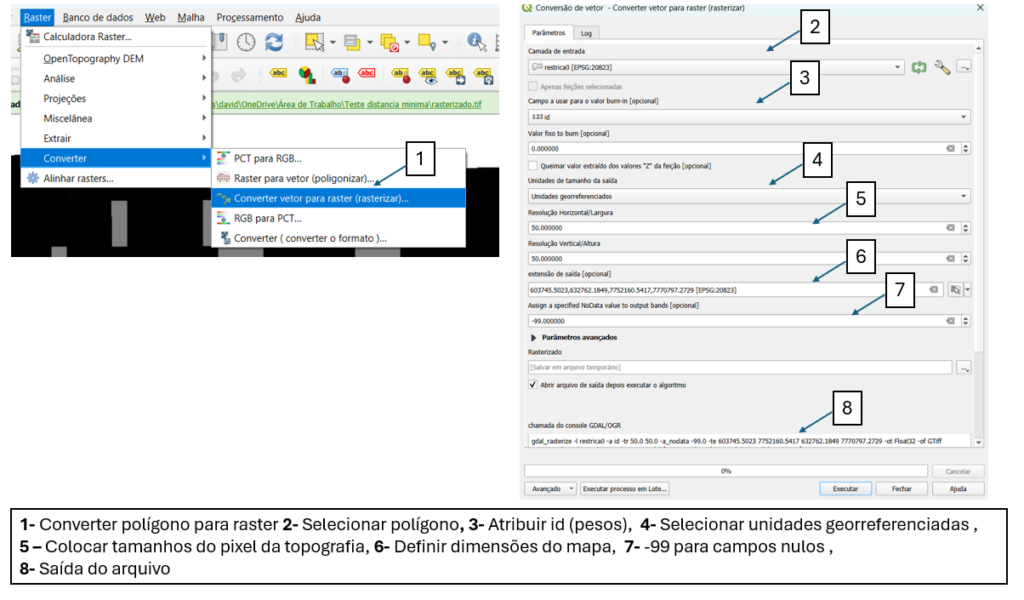
E então utilizamos a calculadora de campos para somar os dois rasters.
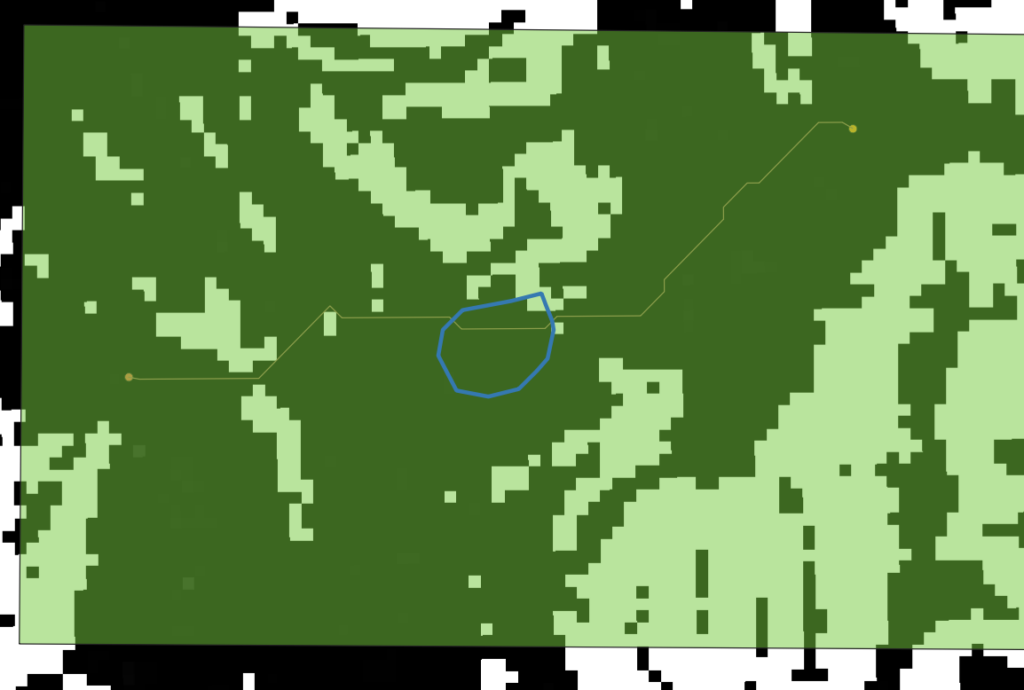
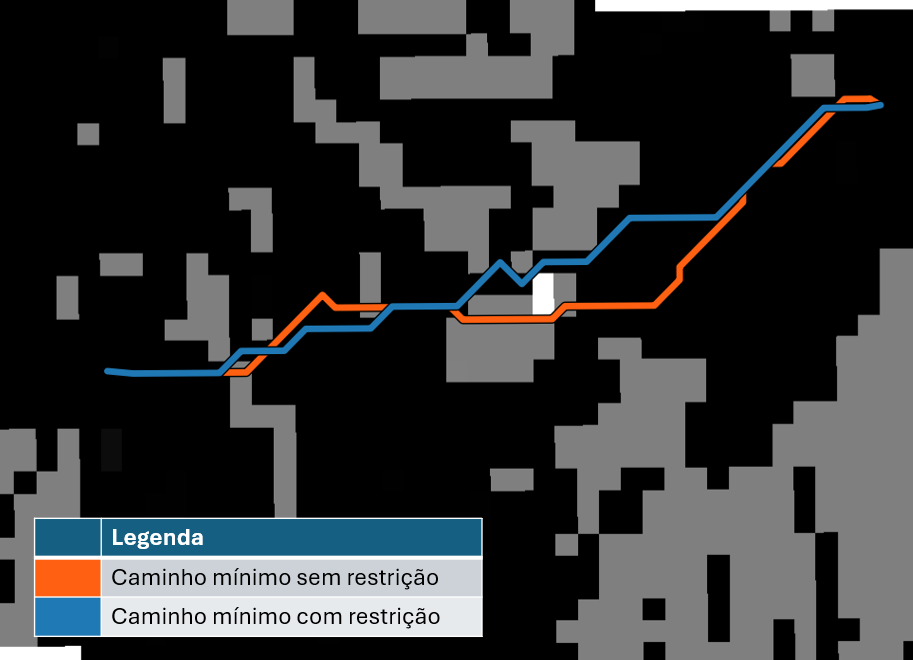
Com isso temos uma nova região de restrição e podemos rodar o algoritmo novamente.
Podemos notar na figura abaixo o novo caminho gerado com a restrição local adicionada e sem a restrição local adicionada.
5. Conclusão
Em síntese, a incorporação de cálculos automáticos de DMT baseados em topografia digital consolida-se como uma ferramenta estratégica para o planejamento mineiro moderno, ao unir precisão técnica, agilidade operacional e maior confiabilidade econômica. A automação desse processo permite que o planejamento acompanhe de forma dinâmica a evolução da lavra, reduzindo incertezas associadas ao transporte de material e antecipando impactos nos custos operacionais. Dessa forma, a DMT deixa de ser apenas um parâmetro estimado e passa a atuar como uma variável de controle contínuo, contribuindo para decisões mais assertivas, melhor uso dos recursos e maior eficiência global das operações de mineração.
Referências bibliográficas
- Hustrulid, W., Kuchta, M., & Martin, R. (2013). Open Pit Mine Planning and Design. CRC Press, Taylor & Francis Group.
→ Referência clássica para planejamento de lavra, transporte, DMT e otimização de cava. - Darling, P. (Ed.) (2011). SME Mining Engineering Handbook (3rd ed.). Society for Mining, Metallurgy & Exploration (SME).
→ Capítulos sobre haulage, mine planning, fleet sizing e custos de transporte. - Camus, J. P., Coulombe, C., & Darling, P. (2014). Mining Engineering Analysis. SME.
→ Base conceitual para análise de custos operacionais e parâmetros como DMT. - Thompson, R. J., & Visser, A. T. (2003). Mine Haul Road Design and Management. South African Institute of Mining and Metallurgy (SAIMM).
→ Referência fundamental para traçado de vias, rampas e impacto no transporte. - Runge, I. C. (1998). Mining Economics and Strategy. Society for Mining, Metallurgy & Exploration.
→ Relação entre parâmetros operacionais (DMT) e viabilidade econômica. - McCarthy, P. L. (2005). Surface Mine Haulage. SME Transactions.
→ Discussão direta sobre distâncias de transporte e desempenho da frota. - QGIS Development Team (2023). QGIS User Guide. Open Source Geospatial Foundation (OSGeo).
→ Documentação oficial sobre modelos digitais de terreno, análise de custo e automação espacial. - Neteler, M., Bowman, M. H., Landa, M., & Metz, M. (2012). GRASS GIS: A multi-purpose open source GIS. Environmental Modelling & Software, 31, 124–130.
→ Base teórica para análises raster, custo acumulado e caminhos mínimos. - Burrough, P. A., & McDonnell, R. A. (1998). Principles of Geographical Information Systems. Oxford University Press.
→ Fundamentos matemáticos de análise espacial e superfícies de custo. - Chorley, R. J., Schumm, S. A., & Sugden, D. E. (1984). Geomorphology. Methuen.
→ Base conceitual para topografia, relevo e modelagem de superfícies.
Share this content: